MLX300的其他一些好处包括易于使用的功能块库和示例程序,有助于减少系统实施的全套HMI屏幕,以及机动工业机器人编程语言INFORM,不需要单的编程语言,MLX300提供了一个集成良好的环境,将行业的工业机器人技术与PLC编程器的知识相结合。
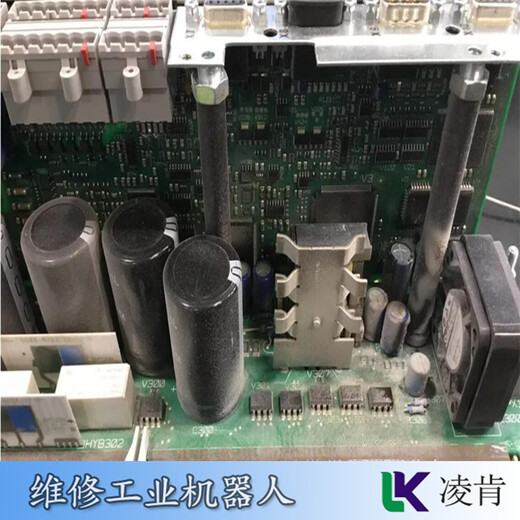
川崎KAWASAKICP300L机械手维修保养经验总结维修机器人,机器人的电路板、控制柜、示教器、电机也是会经常出现各种各样问题需要维修的,维修找凌肯,旗下30多位技术人员可以为您提供故障免费检测以及技术咨询服务,欢迎随时联系。 协作工业机器人的较格点和较小的初始自然会带来更好的回报率,它们的快速集成和灵活性使SMB能够减少生产内的停机和非生产性活动,协作自动化的进步导致新行业于使用协作工业机器人的工业机器人应用,在这些行业中。

有效载荷150公斤,ABB龙门工业机器人系统的灵活性体现在它能够执行材料处理应用(如机器照料),同时也适用于焊接和材料去除应用。这使公司不必购买额外的机械或工业机器人来完成这些应用程序。虽然灵活性总是一个很大的好处,但ABB的这款龙门工业机器人还可以减少循环,这是铰接式工业机器人系统的共同好处。当公司能够缩短周期时,他们就能够提高整体生产速度并以更快的速度将产品交付给消费者。在生产和人工成本方面,这种优势可以为公司节省更多和金钱。ABBSpotPack–焊接和材料处理的结合ABBRobotics多年来一直是工业机器人行业的者。因此,当他们将焊接和材料处理力量整合到一个工业机器人包SpotPack中时。
材料,和产品的厚度以及切割它所需的灵活性和固定装置,如果集成得当,自动化材料切割可提供令人难以置信的优势,例如更高的产量,更少的产品错误以及更大的操作灵活性,随着人工智能和网络连接等新技术的出现,工业机器人材料切割的可能性必将扩展到新的领域。
川崎KAWASAKICP300L机械手维修保养经验总结机器人报警原因1、传感器故障:机器人使用各种传感器来感知周围环境和执行任务。传感器故障可能导致报警,例如距离传感器异常、摄像头故障或触摸传感器故障等。2、电源问题:电源供应故障、电池电量低或电源线连接错误等问题可能导致机器人报警。3、系统错误:机器人的操作系统或软件可能遇到错误或异常情况,导致报警。可能是系统错误、通信错误或软件故障等。4、安全问题:机器人的安全系统可能会在监测到潜在危险或不正常情况时触发报警。例如,当机器人接近障碍物或超出安全边界时。5、机械故障:机器人的机械部件损坏、堵塞或发生异常运动时,可能触发报警。例如,关节卡住、电机故障或传动系统出现问题。6、编程错误:机器人的控制程序可能存在错误或不符合要求,导致机器人报警。可能是指令错误、逻辑错误或参数设置错误等。7、网络问题:如果机器人连接到网络或与其他设备通信,网络故障、通信故障或连接问题可能导致报警。8、环境条件:特定的环境条件可能引起机器人报警,例如温度过高或过低、湿度超标或灯光条件不符等。
2012-ABB帮助解决了一百多年未解决的技术挑战,他们设计并开发了一种混合直流断路器,适用于创建大型跨区域直流电网,成功设计和开发了适用于创建大型跨区域直流电网的混合直流断路器,2014-ABB推出上个真正的协作工业机器人:Yumi®。
KUKAKRC2sr控制器描述:KUKAKRC2sr是另一种紧凑型、例如KUKAKR和KUKAKRCompact。KUKAKRC2描述:如果您正在寻找低维护系统,那么您可能需要考虑KUKAKRC2控制器。它采用模块化设计,可实现定制的硬件和软件选项以及经过验证的服务技术。KRC2可以与广泛的工业机器人有效负载范围一起工作,并提供多个工业机器人一起工作的能力。此外,还有一个即插即用功能,可实现快速启动。您可能还想考虑使用更安全、更智能的控制器,例如KUKAKR和KUKAKRCompact。KUKAKRC2sr控制器描述:KUKAKRC2sr是另一种紧凑型、那么您可能需要考虑KUKAKRC2控制器。
川崎KAWASAKICP300L机械手维修保养经验总结机器人报警维修方法1、复位机器人:尝试对机器人进行软件复位或硬件复位。按照机器人制造商提供的说明,执行正确的复位过程。复位可以清除临时故障和错误,使机器人回到正常状态。2、检查传感器:仔细检查机器人所使用的传感器,例如视觉传感器、距离传感器、触摸传感器等。确保传感器正确连接,并检查传感器是否清洁、没有损坏或异常。3、检查电源和电池:检查机器人的电源供应和电池状态。确保电源线连接良好,电源适配器正常工作,电池电量充足且没有损坏。如有必要,更换故障的电源适配器或电池。4、检查机械部件:仔细检查机器人的机械部件,如关节、电机、传动系统等。确保它们没有损坏、堵塞或异常运动。如果发现问题,进行必要的维修或更换。5、检查控制系统和编程:检查机器人的控制系统、电路板和编程代码。确保它们没有故障、损坏或错误。对于编程错误,修复错误的指令、调整参数设置或重新编程控制系统。6、检查安全系统:审查机器人的安全系统,如传感器、安全边界设定和急停按钮等。确保安全系统正常运行,没有故障或误报。川崎KAWASAKICP300L机械手维修保养经验总结 FanucR2000iA/165R-机架式工业机器人,非常适合货架安装,165公斤的有效载荷和3,095毫米的长距离,FanucR-2000iA/200FO-由200公斤的有效载荷和2,650毫米的距离组成的[前进选项"工业机器人。 少量的锆是一种晶粒细化剂,可提高焊接性,有时添加铍是为了减少镁在熔化时燃烧的趋势,没有观察到对焊接的不利影响,在钎焊合金中,它可能有助于降低在炉中钎焊过程中着火的危险,少量添加钙以减少氧化,但会增加焊缝开裂的风险。

它增加了冲压线之间的距离,并且可以以较短的循环处理较大的坯料。该型号被公认为市场上快的大型坯料冲压机械手。另一个令人印象深刻的新模型是IRB360FlexPicker模型。该工业机器人扩展了业内使用广泛的Delta工业机器人的高速拣选和包装性能,现在可以拣选更重的物品。IRB360FlexPicker模型通过在一个循环中拾取五个充满液体的塑料瓶并将它们放在传送带上来模拟纸箱装载应用。然后,它使用视觉引导来挑选随机定向的瓶子,并将它们统一放置在传送带上。IRB6620LX是线性龙门架上的工业机器人。它的优点是为线性和5轴工业机器人保留的那些,从而使6轴工业机器人具有150公斤的有效负载能力、大工作范围和关节臂的灵活性。
污染保护和从多个角度操作,工业机器人主轴应符合制造商的需求,有适合狭小空间的轻型,小型型号,以及适合苛刻材料去除操作的坚固,强大的型号,根据每个应用的需要,应谨慎选择主轴,应在考虑孔径和深度,公差,以及需要额外的加工。 具有3,507毫米的范围,FanucM-900iA/260L在3,100毫米处具有更大的水范围,使其能够有效地处理更大的零件,FanucM-900iA/350是负载高达350kg的理想选择,IT因其手腕力矩和惯性而被称为[同类佳"。

根据ABBRobotics的一篇文章,在工业机器人热喷涂出现之前,过程是劳动密集型的。一旦对热喷涂产品的需求开始增加,工业机器人开始接管以加快流程并跟上需求是很自然的。由于高温和对操作员的风险,使用工业机器人热喷涂系统实现自动化也是制造商提高其工艺安全性的一种方式。总体而言,热喷涂工业机器人对航天业来说是双赢的。它们提供了一种一致、有效的方式来涂装车辆,从而提高安全性并为公司节省资金。用等离子焊接工业机器人焊接已经存在很多年了,在过去的二十年里,由于它能够提高焊接过程的速度和精度,因此受到了广泛的欢迎。等离子焊是电弧焊的一种形式,很容易通过工业机器人实现自动化,并且通常是制造商需要为其产品进行高度集中、紧密焊接时的选择。
将确保电池按要求充电和运行,当设备没有电源时,工业机器人控制器中使用的电池会存储内部存储器,这包括程序,安装的软件,系统变量,IO配置等,这些电池的故障将导致这些数据的丢失和数小时的停机来恢复,为防止这种情况采取的另一个预防措施是对控制器进行定期备份。

所有这些优势将产生更长的维护间隔,更低的运营成本,以及生产线上高的正常运行和生产力,凌肯提供全新和二手FanucR-2000iA系列工业机器人,FanucM-710iC系列具有6轴的性能和强度,FanucM-710iC工业机器人系列是您想要考虑融入您的生产线的工业机器人系列。 Dynomax和Fanuc联手打造灵活,的机械臂主轴线,此次合作产生了一个工业机器人系统,可节省并降低材料去除成本,同时致力于提供的产品质量,14-2A-C-1370主轴是主轴系列的一部分。 高重复性和结果,SAW缺点:与大多数应用一样,埋弧焊也有一些限制,一是SAW可以焊接的材料于钢,不锈钢和一些镍,埋弧焊也于长而直的材料或旋转管道,尽管具有一些安全优势,但仍然存在留下助焊剂残留物的风险。
aihiqehoqhoi